
¿Qué es?
El objetivo general del proyecto VineaBot es diseñar y desarrollar una herramienta integral para el cuidado y la vigilancia del cultivo de la vid que consta, por un lado, de un vehículo robótico o dron terrestre, autónomo e inteligente capaz de capturar información de forma dinámica a partir de las cámaras y sensores que lleva incorporados y, por otro lado, de una plataforma software de control basada en una solución cloud capaz de identificar los factores de riesgo para el cultivo a partir de la información recolectada por el dron.

Objetivos ambientales.
Desarrollar un dron eficiente, de bajo consumo y que emplea energía solar para su funcionamiento.
Gracias a la información proporcionada por el dron será posible tener un control riguroso del estado de cultivos de vid, con ello se podrá optimizar el uso de tratamientos químicos empleados en los mismos, para su mantenimiento y conservación.
- La captura de información procedente de cada una de las parcelas que son propiedad de la explotación vitivinícola.
- El análisis y la interpretación de los datos recopilados, tanto a nivel de sensores como de imágenes o muestras.
Los viticultores requieren de sistemas o soluciones autónomas e inteligentes que mejoren la productividad y la calidad del producto final reemplazando directamente a la presencia humana en la realización de las tareas de cuidado, seguimiento y vigilancia de los cultivos de la vid que se llevan a cabo de forma recurrente. Así, en este contexto, nace VineaBot como herramienta de ayuda a los viticultores. Además, mediante la utilización de VineaBot no solo se reducirá el esfuerzo manual que actualmente realizan los viticultores (mejora de la productividad), sino que se dará respuesta a algunas de las problemáticas existentes que impiden la utilización de tecnología de última generación en un entorno natural (duración de la batería, movilidad, coste…). La herramienta integral VineaBot que se pretende desarrollar en el presente proyecto se compone de dos elementos:
- Vehículo robótico o dron terrestre, autónomo e inteligente capaz de capturar información de forma dinámica a través de la cámara de alta resolución y los sensores que tiene incorporados. La información capturada será enviada en tiempo real por el dron al servidor central.
- Plataforma software de control del ecosistema donde se ejecutarán las acciones de computación. Esta plataforma se alojará en un servidor central y será capaz de proporcionar información fidedigna sobre el estado del cultivo y los posibles factores de riesgo por los que se pueda estar viendo afectado.
Conducción.
El dron que forma parte del ecosistema VineaBot dispondrá de dos opciones de pilotaje:
Conducción remota
Conducción autónoma.
Uno de los principales retos de este proyecto es desarrollar los algoritmos de inteligencia artificial y aprendizaje automatizado a partir de los cuales el dron podrá tomar decisiones que le permitan:
- Llevar a cabo movimientos programados de forma autónoma.
- Evitar los diferentes obstáculos que se pueda encontrar durante su recorrido.
El proceso de guiado del dron será gestionado por dos sistemas distintos: la tecnología LIDAR (Light Detection and Ranging) y la cámara de baja resolución que estará situada en la parte delantera del dron. Con el LIDAR se podrá identificar si en la parte delantera el dron se va a encontrar con un obstáculo. La cámara de baja resolución no solo servirá para el reconocimiento de obstáculos sino también para alinear el dron en el camino, permitiendo hacer las correcciones necesarias para mantenerse centrado en el lineal que esté recorriendo.
Para que el dron pueda llevar a cabo las funciones de conducción autónoma, a la hora de realizar una tarea en una parcela, el sistema central enviará al dron una hoja de ruta tanto con la información sobre la tarea a realizar como con el recorrido a seguir. Adicionalmente, será posible reprogramar algunas funciones o tareas a voluntad del operario ante cualquier contingencia o alarma.
Gracias al grupo de sensores que llevará incorporados el dron se podrá captar en tiempo real una serie de parámetros/datos importantes para el usuario final y que tienen repercusión directa o indirecta con la calidad y cantidad de la producción del viñedo. El grupo de sensores con el que a priori contará el dron son:
Sensor de temperatura
Sensor de humedad
Sensor de luz (radiación) ultravioleta (UV).
Barómetro
Giroscopio
GPS
Cámara de alta resolución para realizar capturas del entorno y de partes concretas de las plantas.
Tras el procesamiento de estas imágenes se obtendrán una serie de datos muy interesantes que ayudarán a la toma de decisiones y a la identificación de factores de riesgo para el cultivo de la vid.
El proyecto “Diseño y desarrollo de una herramienta integral para el cuidado y la vigilancia de los cultivos de la vid” con acrónimo VineaBot surge para dar respuesta a las necesidades del sector vitivinícola, el cual demanda herramientas para la agricultura de precisión por el ahorro de recursos que pueden llegar a generar a sus explotaciones vitivinícolas.
En concreto, Enogés ha sido capaz de detectar la necesidad tecnológica que tienen las explotaciones vitivinícolas de automatizar y digitalizar las tareas rutinarias de cuidado, seguimiento y vigilancia de los cultivos de la vid que actualmente dependen de la intervención humana para su ejecución y que son:
- La captura de información procedente de cada una de las parcelas que son propiedad de la explotación vitivinícola.
- El análisis y la interpretación de los datos recopilados, tanto a nivel de sensores como de imágenes o muestras.
Los viticultores requieren de sistemas o soluciones autónomas e inteligentes que mejoren la productividad y la calidad del producto final reemplazando directamente a la presencia humana en la realización de las tareas de cuidado, seguimiento y vigilancia de los cultivos de la vid que se llevan a cabo de forma recurrente.
Así, en este contexto, nace VineaBot como herramienta de ayuda a los viticultores. Además, mediante la utilización de VineaBot no solo se reducirá el esfuerzo manual que actualmente realizan los viticultores (mejora de la productividad), sino que se dará respuesta a algunas de las problemáticas existentes que impiden la utilización de tecnología de última generación en un entorno natural (duración de la batería, movilidad, coste…).
La herramienta integral VineaBot que se pretende desarrollar en el presente proyecto se compone de dos elementos:
- Vehículo robótico o dron terrestre, autónomo e inteligente capaz de capturar información de forma dinámica a través de la cámara de alta resolución y los sensores que tiene incorporados. La información capturada será enviada en tiempo real por el dron al servidor central.
- Plataforma software de control del ecosistema donde se ejecutarán las acciones de computación. Esta plataforma se alojará en un servidor central y será capaz de proporcionar información fidedigna sobre el estado del cultivo y los posibles factores de riesgo por los que se pueda estar viendo afectado.
A continuación, se presentan las principales características y funcionalidades de cada uno de los elementos que conformarán el ecosistema VineaBot.
Dron terrestre.
A continuación, se detallan los sistemas o bloques de elementos diferenciados que integran el dron, así como los componentes electrónicos que componen cada uno de ellos:
- Sistema de locomoción: compuesto por todos los elementos necesarios para el desplazamiento del dron: 6 motores, 6 Arduino, 3 controladores o drivers, una Raspberry Pi, un sensor de proximidad LIDAR y una cámara de baja resolución.
- Sistema de detección: comprende al conjunto de sensores y a la cámara de alta resolución que se incorporan en el dron para la recogida de datos y la toma de muestras (imágenes) respectivamente.
- Sistema de comunicaciones: integrado únicamente por un módulo 4G dado que la placa Raspberry Pi que conforma el sistema de control del dron ya cuenta con conectividad bluetooth y Wifi para el intercambio de información con el exterior.
- Sistema de control: formado por una Raspberry Pi dedicada al cálculo, análisis y manipulación de las señales procedentes del sistema de detección, así como a la generación y envío de señales de control para el gobierno del sistema de locomoción y al procesado de mensajes procedentes del sistema de comunicaciones.
- Sistema de alimentación formado por el sistema de acumulación de energía (baterías) cuyo sistema de carga se basará en energía solar y por las propias placas solares incorporadas en la parte superior del dron para alargar la autonomía del mismo por encima de la duración de las baterías.
Funcionalidades del dron
Las funcionalidades que van a ser desarrolladas en el dron son las que se muestran a continuación:
1. Conducción
El dron que forma parte del ecosistema VineaBot dispondrá de dos opciones de pilotaje:
a. Conducción remota
Para que esta opción de conducción sea posible será necesario que exista cobertura 4G/3G+ estable ya que será la tecnología empleada para la comunicación entre la aplicación de la que dispondrá el operario y el dron. Las funciones que será capaz de gestionar el operario en remoto son las siguientes:- Control del movimiento del dron en los cuatro sentidos: adelante, atrás, derecha e izquierda.
- Visión de las dos cámaras ubicadas en el dron, si la conexión lo posibilita.
- Datos de telemetría.
b. Conducción autónoma
Uno de los principales retos de este proyecto es desarrollar los algoritmos de inteligencia artificial y aprendizaje automatizado a partir de los cuales el dron podrá tomar decisiones que le permitan:- Llevar a cabo movimientos programados de forma autónoma.
- Evitar los diferentes obstáculos que se pueda encontrar durante su recorrido.
2. Captura de información del entorno.
Gracias al grupo de sensores que llevará incorporados el dron se podrá captar en tiempo real una serie de parámetros/datos importantes para el usuario final y que tienen repercusión directa o indirecta con la calidad y cantidad de la producción del viñedo. El grupo de sensores con el que a priori contará el dron son:
Sensor de temperatura
Sensor de humedad
Sensor de luz (radiación) ultravioleta (UV).
Barómetro
Giroscopio
GPS
Cámara de alta resolución para realizar capturas del entorno y de partes concretas de las plantas.
PLATAFORMA SOFTWARE DE CONTROL
El ecosistema VineaBot se completará con una potente plataforma de software que llevará a cabo las siguientes funcionalidades:
- Llevar a cabo los procesos de recogida y almacenamiento de información proveniente tanto de los diferentes sensores como de la cámara de alta resolución del dron.
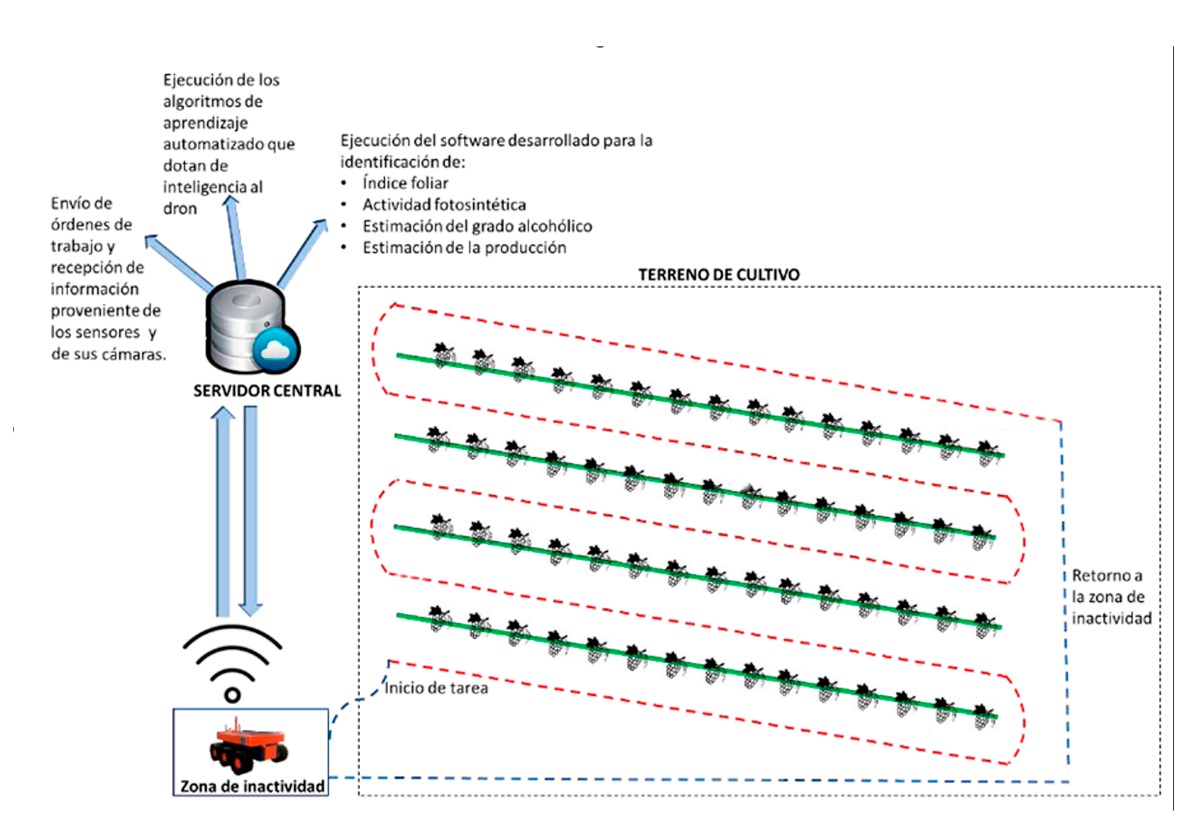
- Ejecutar el software desarrollado para el análisis e interpretación de la información capturada por el dron.
- Enviar al dron información sobre las tareas a ejecutar en cada planificación, así como ejecutar los algoritmos de aprendizaje automatizado desarrollados a partir de los cuales se dotará al sistema de la capacidad necesaria para llevar a cabo las tareas.
| Dicha plataforma de software se alojará en un único servidor central que requerirá: |
|---|
|
Estar protegido eléctricamente contra cortes de luz y sobretensiones. |
|
Estar encendido y operativo al menos un 99% del tiempo. |
|
Una conexión a Internet activa al menos el 99% del tiempo que el servidor esté activo. |
|
Una gran cantidad de espacio de almacenamiento, mínimo de 1 Tb. |
|
Una memoria RAM de al menos 16 Gb. |
|
Un procesador con un mínimo de 8 núcleos de 3 Ghz. |
|
Una tarjeta gráfica encargada de procesar los datos de las imágenes obtenidas y de realizar los cálculos de inteligencia artificial. |
A continuación, se describe la estructura y la arquitectura de los servicios que se tendrán que desarrollar en el servidor cloud para el óptimo funcionamiento del ecosistema:
- Conexión al exterior. Este grupo está formado por la página comercial, el panel web de administración y el API REST, es decir, por todos aquellos servicios que requieren conectar con el exterior, ya sea proporcionando o enviando información.
- Almacenamiento de la información. Este grupo consta de dos bloques, la base de datos tanto estructurada como no estructurada, y la base de datos de imágenes capturadas por el dron.
- Gestión de la información. Este grupo se refiere al módulo de generación de labores específicas para el dron y los posibles tratamientos de datos que puedan surgir a lo largo del desarrollo.
- Generador de nueva información. Este grupo consta del módulo generador de modelos, el cual almacenará los modelos resultado de pruebas sobre algoritmos de redes neuronales realizados por el generador de conocimiento.
Los factores de riesgo para el cultivo de la vid que se identificarán como consecuencia del análisis e interpretación de la información recolectada por el dron son los siguientes:
- Permeabilidad o aireación del follaje. A partir de la cámara de alta resolución de la que dispone el dron, se escaneará la superficie de cultivo para conocer la cantidad de huecos que hay entre las hojas y, por tanto, la aireación de las cepas.
- Superficie foliar externa (SA). A partir de la cámara de alta resolución se establecerá el área foliar que puede recibir la radiación solar de forma directa. Se trata del índice más utilizado para determinar el desarrollo vegetativo de las cepas y que simultáneamente más incide en la importancia de la actividad fotosintética de los cultivos.
- Colorimetría y nivel de azúcar. A partir de la información óptica que proporciona la cámara de alta resolución incorporada en el dron, se podrá estimar el punto de maduración y de cantidad de azúcar que se convertirá en grado alcohólico.
- Cantidad de racimos/rendimiento. A partir del conteo de racimos que contiene cada cepa, se podrá estimar la producción de una parcela.
- Alertas de posibles enfermedades. A partir de los datos recogidos por los sensores de humedad y temperatura y de las imágenes capturadas por la cámara de alta resolución, se podrán generar alertas de posibles alteraciones anormales a la par que posibles enfermedades de los cultivos.
Impacto debido a la realización del proyecto. Nuevas actuaciones de I+D derivadas. Impacto en otras actuaciones existentes de I+D.
A medio plazo y debido a la realización del proyecto, Enogés espera convertirse en uno de los actores principales dentro de la digitalización del sector primario, y más concretamente de la digitalización del sector vitivinícola, ya que es el sector al que primera y principalmente se ha enfocado su herramienta.
La tecnología desarrollada en el proyecto VineaBot para el sector vitivinícola no es una tecnología exclusiva para el mismo, de hecho, se espera poder extrapolar en el futuro dichos avances a otro tipo de maquinaria y de sectores completamente dispares. Son múltiples las líneas de diversificación que ofrece el proyecto VineaBot. En función de los resultados obtenidos con el desarrollo del proyecto, en una segunda fase, Enogés pretende expandir el proyecto a otras áreas del sector agrícola o incluso a otros sectores como pueden ser el de la ganadería, la vigilancia o la seguridad.